Pregunta al experto
Tim Hochberg
Ingeniero senior de aprendizaje automático

¿Cómo se combinan los datos del sistema de identificación automática con imágenes satelitales para identificar embarcaciones rastreadas públicamente?
Los sistemas de identificación automática, comúnmente conocidos como AIS, transmiten la posición de un barco y alertan a otros sobre su paradero. Aunque originalmente fue diseñado como un mecanismo para evitar colisiones, el AIS se utiliza regularmente en el seguimiento y supervisión de las flotas pesqueras. Pero existen limitaciones para el AIS.
Aparte de que el AIS no es obligatorio de forma universal, una mala recepción puede significar información de posición incompleta, y la manipulación de los datos en sí permite a los operadores ocultar sus ubicaciones reales. El AIS puede incluso desactivarse por completo. Para tener una imagen completa de lo que sucede en el mar, el AIS a menudo se compara con otros tipos de datos, incluidas imágenes de satélite. Esto nos permite determinar si lo que estamos viendo es consistente con lo que nos muestran los datos de seguimiento.
Pero cotejar los datos AIS con las imágenes satelitales es un desafío. Esto se debe a que los mensajes AIS se reciben a intervalos irregulares, con mucha menos frecuencia de la que se transmiten. Un barco puede transmitir un mensaje AIS una vez cada tres minutos (a veces incluso varias veces por minuto dependiendo del tipo de transpondedor AIS que se utilice y de lo que esté haciendo el barco), pero estos mensajes no siempre se reciben. Esto puede respoder a muchos factores que incluyen cobertura satelital intermitente, mala recepción debido a altas concentraciones de embarcaciones que sobrecargan los receptores, y la reducción discrecional de mensajes para ahorrar datos por parte de los proveedores de AIS. Como resultado, a menudo tenemos que estimar la posición de un barco en el momento en que se tomó la imagen basándonos en mensajes que se enviaron minutos o incluso horas antes o después. Para hacer las cosas más complejas, las imágenes de satélite a menudo contienen múltiples embarcaciones, algunas de las cuales no están equipadas con AIS, lo que dificulta la comparación de los datos. Y a veces los barcos no aparecen en las imágenes en absoluto, un problema particular para las embarcaciones pequeñas.
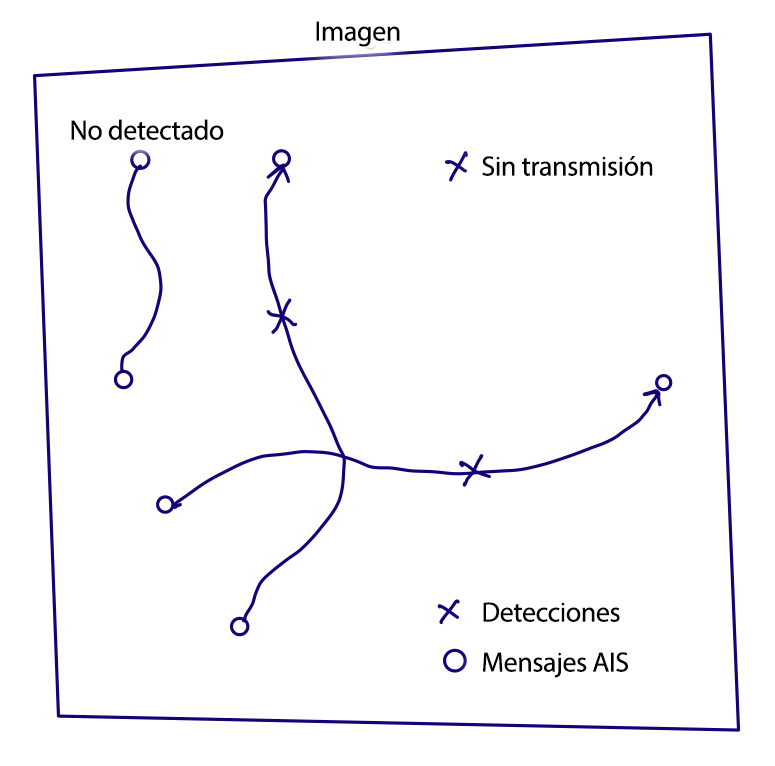
Situaciones que pueden surgir durante la comparación AIS
Cuando uno o más barcos detectados están transmitiendo mensajes AIS (líneas en el centro) necesitamos identificar qué mensaje corresponde a cada barco. Esto puede complicarse por la necesidad de tener en cuenta que se pueden detectar embarcaciones que no están transmitiendo AIS (línea superior derecha) y es posible que algunas embarcaciones con transmisión no se detecten en la imagen (línea superior izquierda). ⓒ 2023 Global Fishing Watch
La clave para hacer cotejar con precisión los datos AIS con las detecciones satelitales es estimar la probabilidad de que cada embarcación se encuentre en cada detección, dados los mensajes transmitidos justo antes y después de que se tomara la imagen. Hay muchas formas de aproximarse a esto, y cada enfoque se basa en diferentes suposiciones sobre cómo se mueven los buques. Hemos descubierto que el enfoque más eficaz es extraer los datos históricos de AIS para calcular las probabilidades. Es decir, considerando el tipo y la velocidad de una embarcación, podemos calcular la probabilidad de que la embarcación se encuentre en un lugar determinado en relación con su posición inicial y su rumbo.
Por ejemplo, en la figura siguiente, mostramos los mapas de probabilidad para buques de carga y palangreros después de 16 minutos a distintas velocidades: 3, 5, 7 y 9 nudos. Si el barco avanzara en línea recta a velocidad constante, lo encontraríamos en el centro del mapa. La probabilidad alcanza su punto máximo allí, lo que se indica mediante la sección más brillante de cada imagen. Generalmente, se supone que la probabilidad disminuye simétricamente a partir de ese punto, lo que daría como resultado mapas de probabilidad circulares. Sin embargo, en la práctica estos mapas pueden ser muy asimétricos, pasando de ser bastante circulares a bajas velocidades a tener más forma de chincheta o tachuela a mayor velocidad. Y los detalles del mapa varían entre los diferentes tipos de embarcaciones.
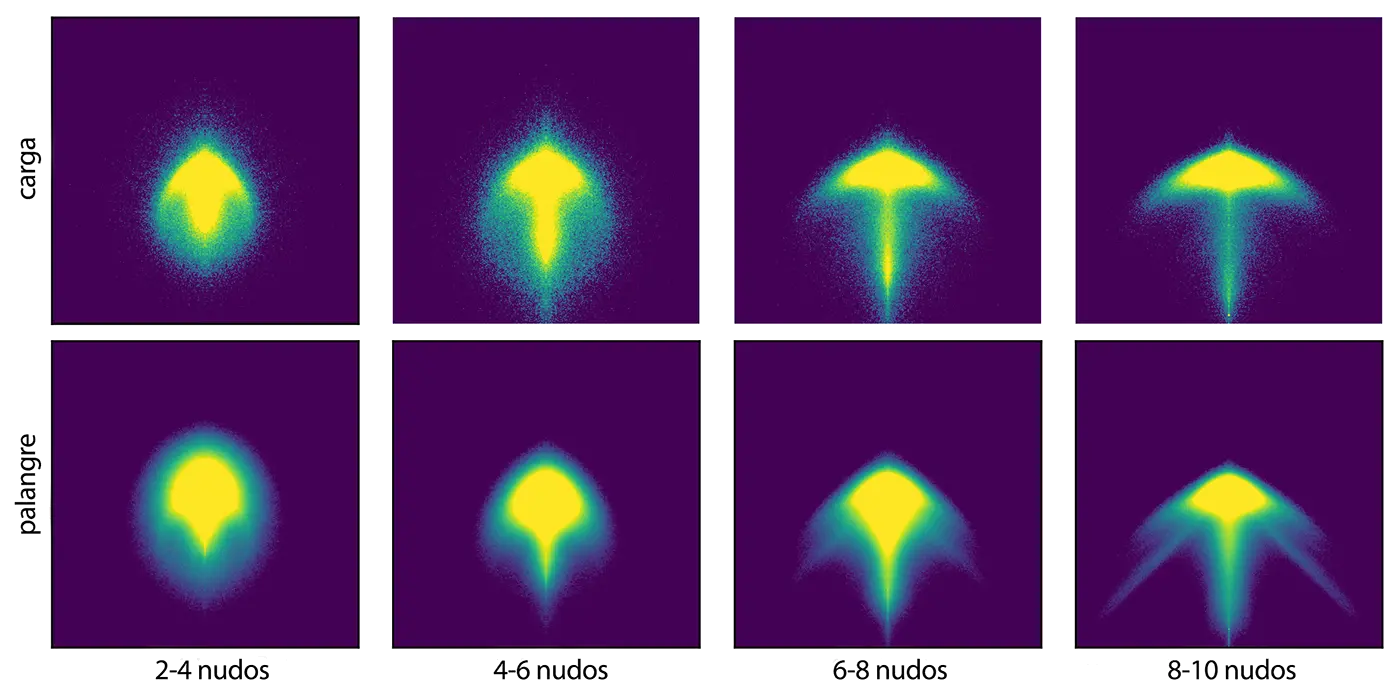
Mapas de probabilidad para dos tipos de embarcaciones a distintas velocidades
ⓒ 2023 Global Fishing Watch
Computar y almacenar eficientemente estos mapas de probabilidad es un desafío central asociado con este método de comparación. Antes de comenzar a cotejar, buscamos el mapa de probabilidad correspondiente al tipo de embarcación, la velocidad y el tiempo en relación con el momento en que se tomó la imagen para cada mensaje AIS. Si hay un mensaje correspondiente para un barco antes y después de que se capturara la imagen, fusionamos los dos mapas resultantes y utilizamos un promedio ponderado para tener un mapa de probabilidad para cada barco.
Una vez que tenemos mapas de probabilidad para cada conjunto de mensajes AIS en una escena determinada, la comparación es bastante sencilla. Primero, hacemos coincidir la pareja de mensaje y detección con la mayor probabilidad y luego eliminamos ese par de la consideración. Después, repetimos esto con parejas de mensajes y detección hasta que hayamos cotejado todos los pares o hasta que la probabilidad caiga por debajo de nuestro umbral, lo que significa que una coincidencia es lo suficientemente improbable como para correr el riesgo de realizar coincidencias falsas que involucren embarcaciones que no están transmitiendo ni son detectadas.